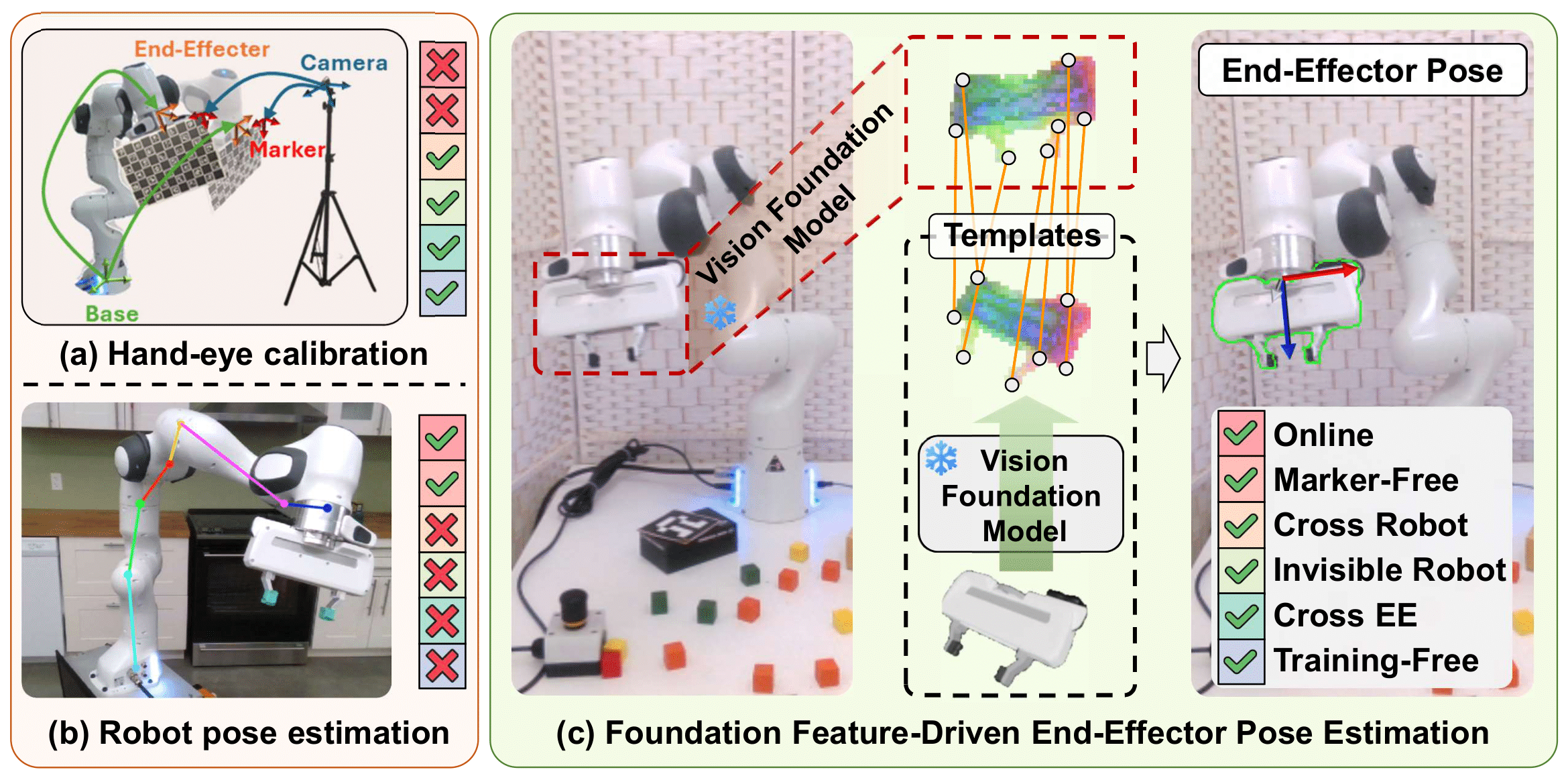
One of the fundamental problems in the field of robot manipulation is estimating the pose of a robot with respect to an external camera. This is to transfer visual observations of the camera to the robot's operating space, allowing the robot to act accordingly. Traditionally this is done by using fiducial markers with known sizes and patterns and calculating its pose with respect to the robot and the camera. This tedious process can only be done offline, calling for methods that can perform calibration online. Hoping to take a step towards online calibration, this paper presents a method that, provided with a CAD model of the target object, can estimate the 6D pose of a novel unseen robot end-effector.